Non-Probability Sampling Network for Stochastic Human Trajectory Prediction
Inhwan Bae, Jin-Hwi Park and Hae-Gon Jeon*
Computer Vision and Pattern Recognition 2022
Abstract
Capturing multimodal natures is essential for stochastic pedestrian trajectory prediction, to infer a finite set of future trajectories. The inferred trajectories are based on observation paths and the latent vectors of potential decisions of pedestrians in the inference step. However, stochastic approaches provide varying results for the same data and parameter settings, due to the random sampling of the latent vector. In this paper, we analyze the problem by reconstructing and comparing probabilistic distributions from prediction samples and socially-acceptable paths, respectively. Through this analysis, we observe that the inferences of all stochastic models are biased toward the random sampling, and fail to generate a set of realistic paths from finite samples. The problem cannot be resolved unless an infinite number of samples is available, which is infeasible in practice. We introduce that the Quasi-Monte Carlo (QMC) method, ensuring uniform coverage on the sampling space, as an alternative to the conventional random sampling. With the same finite number of samples, the QMC improves all the multimodal prediction results. We take an additional step ahead by incorporating a learnable sampling network into the existing networks for trajectory prediction. For this purpose, we propose the Non-Probability Sampling Network (NPSN), a very small network (~5K parameters) that generates purposive sample sequences using the past paths of pedestrians and their social interactions. Extensive experiments confirm that NPSN can significantly improve both the prediction accuracy (up to 60%) and reliability of the public pedestrian trajectory prediction benchmark.
Summary: A purposive non-probability sampling strategy designed for off-the-shelf stochastic trajectory predictors.
Sampling Method
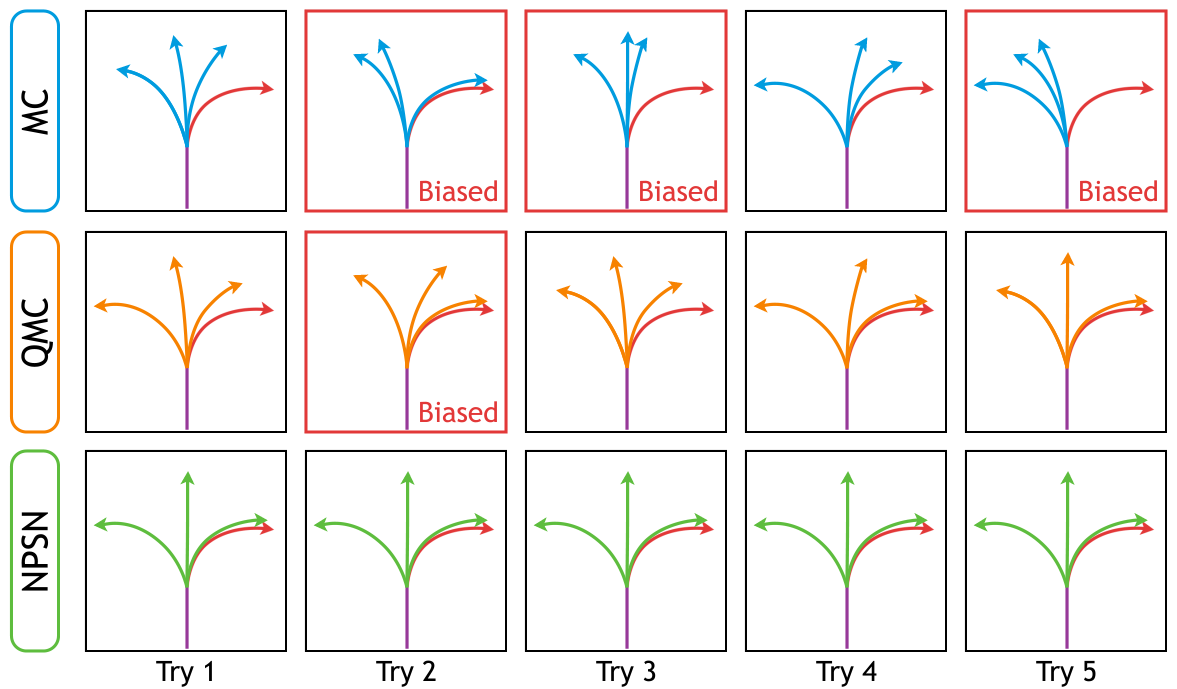
Generated Trajectories Are Biased
Stochastic trajectory prediction models start by generating a random hypothesis. In practice, a fixed number of multiple trajectories are randomly sampled using the Monte Carlo (MC) method, and all existing stochastic models follow this random sampling strategy. However, the number of samples is typically too small to represent socially-acceptable pedestrian trajectories because they are biased toward the random sampling.


Bias Alleviation
We introduce a Quasi-Monte Carlo (QMC) sampling method that effectively alleviates this problem using a low-discrepancy sequence, instead of random sampling. From the view of numerical analysis, a low-discrepancy sequence can be much better than the random one, for a function with a finite variation. For QMC, as the sample comes from a quasi-random sequence, they can be uniformly spaced. This guarantees a suitable distribution for pedestrian trajectory prediction by successively constructing finer uniform partitions. As a result, the low discrepancy sequences have lower errors for the same number of points (N=20).


Purposive Sampling
We push the random sampling forward with a learnable method: Non-Probability Sampling Network (NPSN), a very small network that generates purposive sample sequences using observations and agent interactions. Unlike previous methods, our approach focuses on the sampling method to generate a set of random latent vectors. For that reason, our NPSN maximizes the capability of all types of trajectory generation models including GAN-, CVAE- and Gaussian distribution-based approaches without structurally modifying the existing models.
Qualitative Results


BibTeX
@inproceedings{bae2022npsn,
title={Non-Probability Sampling Network for Stochastic Human Trajectory Prediction},
author={Bae, Inhwan and Park, Jin-Hwi and Jeon, Hae-Gon},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year={2022}
}